Community Projects
The Data and Decision Sciences Lab is constantly working with local community partners on several data related projects that have a local and global impact.
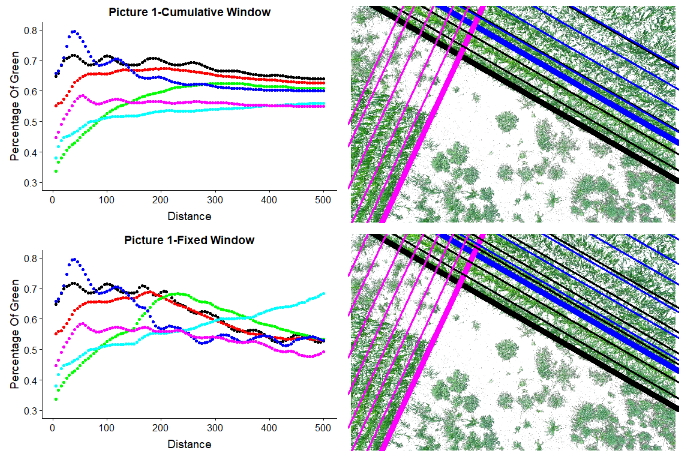
Recognition of Crop Alignment for Unmanned Aerial Vehicle Imagery Data
Community Partner: University of Nebraska–Lincoln – Department of Agronomy and Horticulture
Year: 2018
Team Members Involved
-

- Xiaoyue Cheng
-

- Wei Chen
Corn is not only the food of humans and the feed of livestock, but it is also an important industrial raw material. It can be processed into more than 3,000 industrial products such as corn syrup, corn starch, etc. Corn is one of the essential foods in the world, with about one-third of the population using corn as their primary food. Among the global crop yields, corn production is lower than wheat and rice, ranking third. This project explored how to increase corn production while reducing land use. The genotype of corn may determine the yield of corn, and the phenotype of corn may define the area of land needed to grow the corn, such as the length of the leaves and the height of the corn. Collecting data through drones is cheaper and more efficient than traditional methods of collecting data by hand. The Lincoln Agricultural Laboratory provided cornfield images taken by drones as a data set for this project. There are thousands of genotypes of corn in the cornfield, and every two rows of corn have the same genotype. This project examined the relationship between genotype and phenotype of corn through cornfield images. This project was done to identify the corn area in the image and to find out every two rows of corn of the same genotype based on the characteristics of the image. Recognizing which area in the picture is corn is the first and most crucial step in getting the necessary information about the corn. In the image, there is no label for each pixel, so the project designed and developed a new way to find the location of different genotype plants. The project proposed two algorithms for recognizing plant areas, which are brute force search and parallel divider search. The chi-square test was used to find the corresponding p-value to get a good divider. Two algorithms were also proposed for recognizing each row of plants, by accumulating the window area for alignment detection, and by moving the fixed window for alignment detection to find the position of each row of plants on the hyperplane.